Fizyk Anxo Biasi wyjaśnił koncepcje mechaniki klasycznej na przykładzie zachowania swojego kota: wyobraził sobie swojego pupila jako masę punktową, a jego właściciela jako studnię potencjału, której obecność zmienia zachowanie zwierzęcia. W ten sposób badacz był w stanie wyjaśnić przyczyny kociego egoizmu, mruczenia i okresów szaleńczej, losowej aktywności. Artykuł został opublikowany w „American Journal of Physics”.
Naukowcy od dawna posługują się analogiami między zachowaniem zwierząt a modelami fizycznymi: na przykład dzienną i sezonową aktywność wielorybów grenlandzkich wyjaśniono za pomocą oscylatorów chaotycznych, a ruch stada owiec opisano za pomocą udziału składowych losowych i nielosowych. Modele te okazały się przydatne nie tylko dla fizyków, ale także dla biologów, ujawniając wiele interesujących wzorców (wale grenlandzkie migrują w toni wodnej za swoją ofiarą, podczas gdy owce poruszają się zgodnie z liniową hierarchią w obrębie grupy).
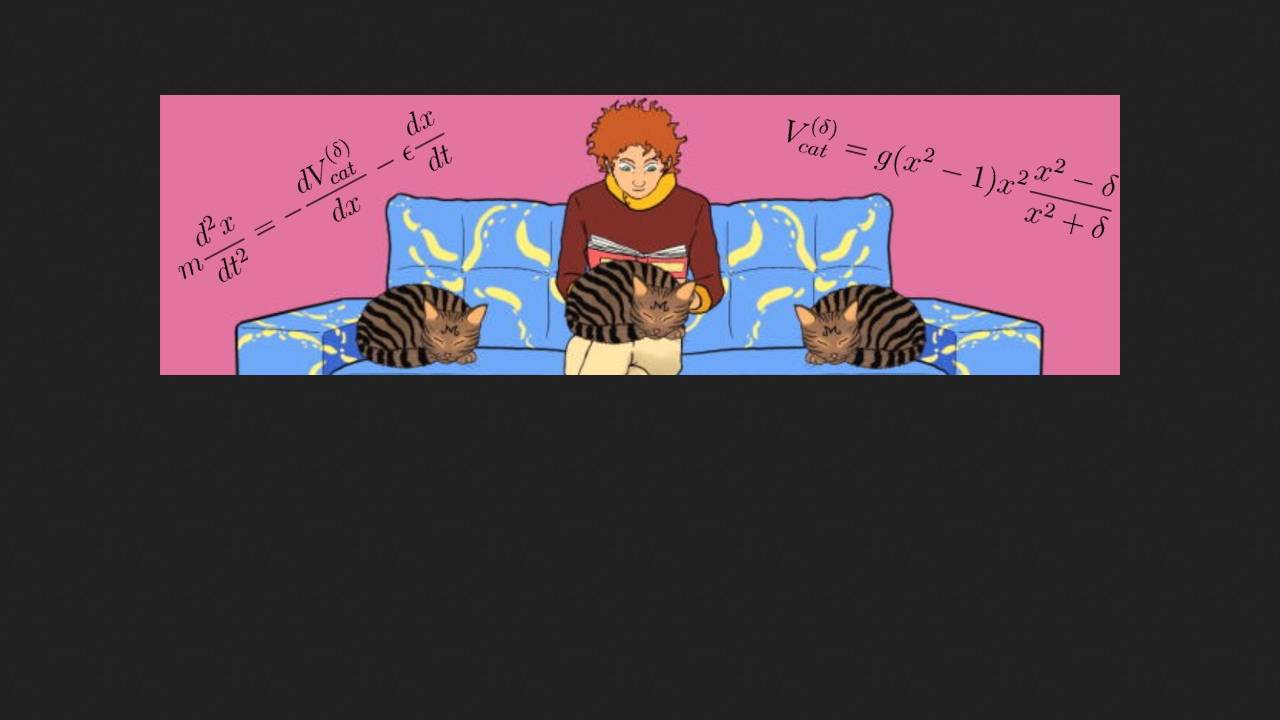
Anxo Biasi z Uniwersytetu Paryskiego, zainspirowany obserwacjami swojego kota, opisał jego ruchy w przestrzeni, wykorzystując mechanikę klasyczną. W tym celu fizyk przedstawił kota jako cząstkę punktową (obiekt o masie, ale pomijalnych wymiarach) i uznał człowieka za potencjał energetyczny – rodzaj pułapki dla cząstki, która wpływa na zachowanie zwierzęcia. Badacz wprowadził również do modelu kilka dodatkowych parametrów: stałą sprzężenia g, która wskazywała poziom przywiązania kota do człowieka, oraz rodzaj tarcia, zmniejszający energię kota (bez tego parametru kot nigdy nie wróciłby do człowieka po pewnym okresie aktywności). Aby uzupełnić model, naukowiec asymptotycznie ograniczył wzrost potencjału, ograniczając w ten sposób człowieka i kota do ograniczonej przestrzeni, takiej jak pokój lub mieszkanie, której zwierzę zazwyczaj nie może opuścić samodzielnie.
Затем физик проанализировал составленное уравнение и объяснил несколько особенностей в поведении кошек. Во-первых, при малой константе связи g получившийся потенциал обладал двумя минимумами, которые соответствовали ситуации отдыха кошки на некотором расстоянии от человека. Если же увеличить уровень привязанности, то кошка-частица сваливалась в образовавшийся дополнительный минимум, совпадающий с положением хозяина в пространстве. Во-вторых, когда кошку тревожит некое внешнее событие (автор привел в качестве примеров полет мухи, неожиданный звук в комнате и бета-распад атома в соседней галактике), то животное стремится покинуть потенциальную яму человека, однако чем выше константа привязанности, тем сложнее вывести кошку из равновесия и заставить переместиться в пространстве.
Наконец ученый проанализировал поведение кошки в том случае, когда ее зовет человек, и выяснил, что в рамках придуманной модели зов хозяина выступает в роли импульса, который увеличивает кинетическую энергию животного. Если величина импульса недостаточна или константа привязанности мала, то кошка отвлекается по пути на другие внешние стимулы и не доходит до человека, либо же вовсе не реагирует на призыв. Автор работы сравнил это поведение с аналогичным у собак и связал менее резвый отклик кошек на призыв хозяина с более сильным внутренним механизмом демпфирования, а не эгоистичностью этих животных. При этом физик заметил еще одну интересную закономерность: чем меньше масса кошки, тем меньше величина импульса, который необходим животному, чтобы увеличить его кинетическую энергию и мотивировать дойти до человека. Этот вывод ученый подкрепляет эмпирическим наблюдением, что котята куда более охотно реагируют на стимулы, если сравнивать их со взрослыми особями.
Физик также преуспел в объяснении периодов буйной случайной активности кошек (явление, также известное как «тыгыдык»). Для этого ученый превратил уравнение движение кошки в стохастическое, добавив внешнее воздействие, которое случайным образом вводило энергию в систему, а затем выводило. Исследователь решил полученное уравнение численно с помощью метода Эйлера — Маруямы, использовав те же предположение, которые применяют для моделирования броуновского движения и предсказания финансовых рынков. Оказалось, что частота и длительность тыгыдыков в первую очередь зависит от константы трения и массы кошки: например, чем больше масса животного, тем реже происходят периоды активности.
Последним феноменом, который физик объяснил с точки зрения классической механики, стало мурлыканье: ученый ввел в модель внешнее вибрирующее воздействие и провел аналогию с маятником Капицы, который можно зафиксировать в вертикальном положении с помощью дополнительных малых колебаний по вертикали. В итоге исследователь предположил, что мурлыканье это механизм, который укрепляет связь кошки-частицы и человека-потенциальной ямы, заставляя последнего гладить животное, что в свою очередь продлевает время мурлыканья.
Autor artykułu zauważył, że opracowany przez niego model można dodatkowo zmodyfikować, aby opisywał interakcje między człowiekiem a psem, a także między psem a kotem. Podkreślił również potencjalne zastosowanie swoich badań w nauczaniu studentów podstawowych pojęć mechaniki klasycznej, które często są trudne do zrozumienia. Podsumowując artykuł, fizyk podziękował swojej kotce, Eme, za inspirację do badania aspektów jej zachowania z perspektywy fizycznej.
To nie pierwszy raz, kiedy koty stały się przedmiotem badań inżynierów mechaników. Na przykład, pisaliśmy o tym, jak fizyk wyjaśnił, jak koty przeżywają upadki z okna.